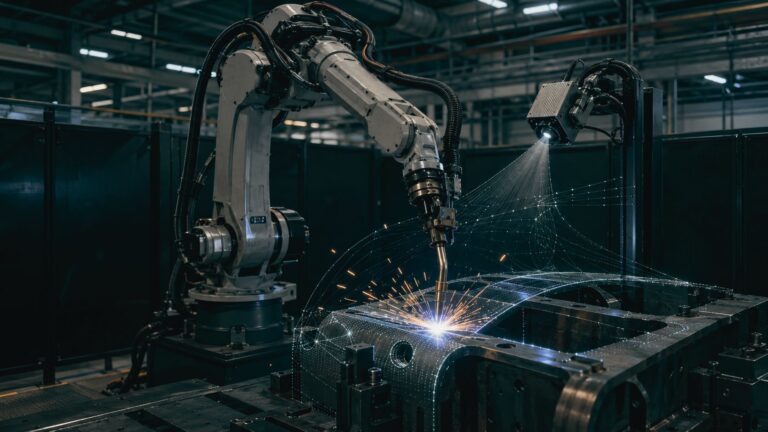
Адаптивно роботизирано заваряване: от пилот до серийно производство
Адаптивното дъгово заваряване с индустриални и колаборативни роботи комбинира офлайн програмиране, сензори за следене на шева и стандартизирана периферия. Резултатът е по-къс цикъл, по-малко доработки и стабилно качество дори при вариации в детайла.
Защо „адаптивно“
В реалната производство детайлите рядко са идеални: има отклонения в геометрията, заваръчни хлабини, термични деформации. Адаптивното заваряване позволява на робота да:
- коригира траекторията в реално време;
- поддържа стабилна дъга и проникване;
- намалява спатера и нуждата от последваща обработка.
Технологични опори
1) Офлайн програмиране (OLP)
Софтуер за симулация и програмиране на роботичната клетка извън машинното време. Ползи:
- бърз старт без спиране на производството;
- проверка за колизии и оптимизирани пътища;
- лесно управление на варианти и серии с малки обеми.
2) Сензорно водене на шева
Лазерно/електрическо „touch sensing“ и следене на шева позволяват динамична корекция на TCP:
- компенсиране на толеранси и изместване;
- стабилна позиция на горелката при ъглови шевове и труднодостъпни зони;
- по-малко брак и стабилни механични свойства.
3) Периферия и стандарти
Роботизирани горелки, почистващи станции, позиционери и антиспатер системи гарантират консистентност:
- по-дълъг живот на консумативите;
- повторяеми стартирания/край на шева;
- бърза смяна на приспособления при варианти.
Кога да изберете кобот, а кога индустриален робот
- Колаборативен робот (cobot): за смесено производство с чести пренастройки, ограничено място, нужда от бързо внедряване и работа „рамо до рамо“ при съответните оценки на риска.
- Индустриален робот: за високи скорости, голям обхват/товар и интеграция с позиционери; предпочитан при масово производство и по-тежки материали.
KPI, които имат значение
- Срок на внедряване (TTV): време от покупка до стабилен цикъл.
- Качество: процент шевове без доработки (Rework %).
- Производителност: цикъл/брой шевове за смяна.
- Разходи: консумативи, газ, енергия, консолидация на операции.
- Гъвкавост: време за пренастройка при нов вариант.
Типични сценарии на внедряване
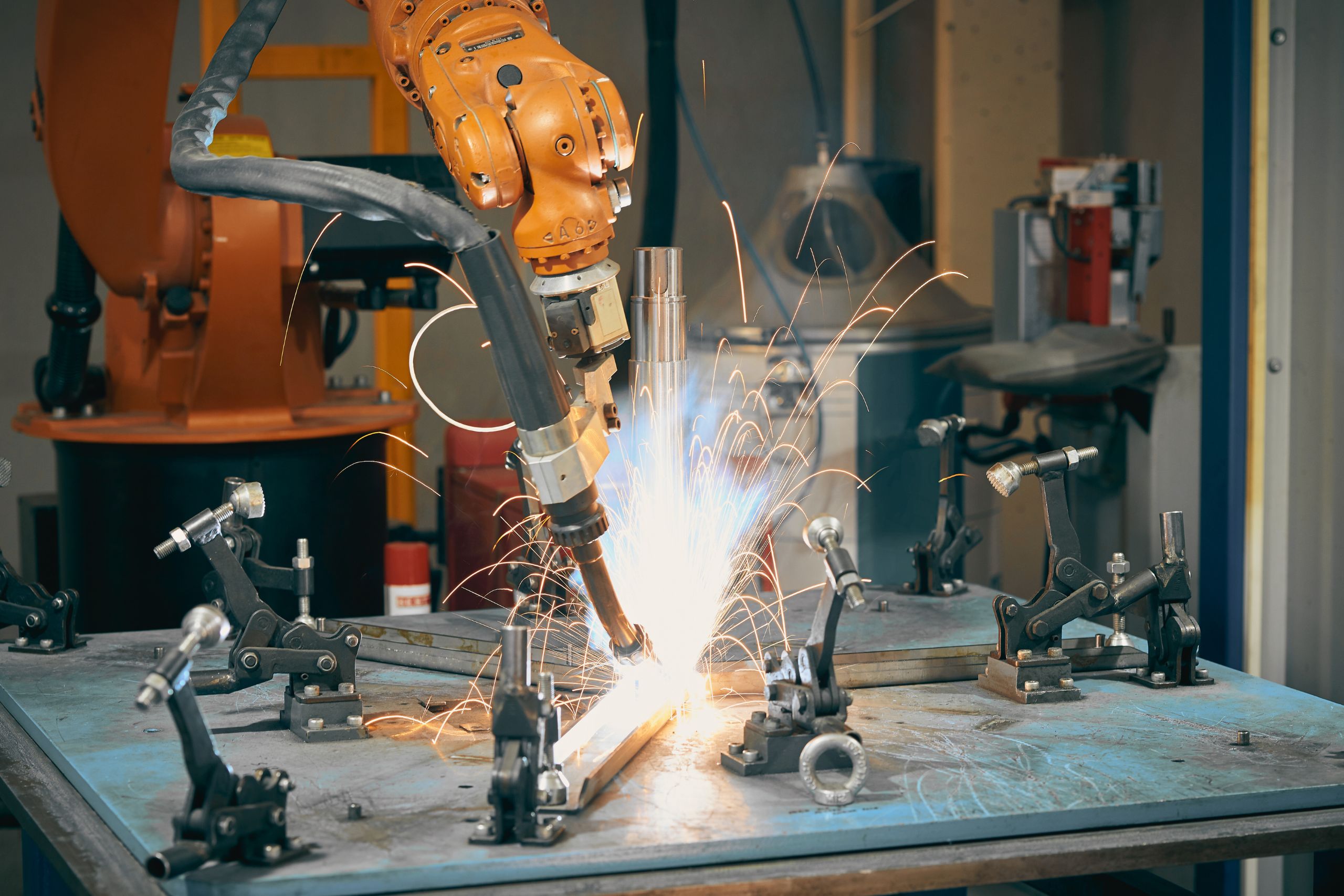
- Пилотна клетка за MIG/MAG – една станция, стандартна горелка, touch sensing; цел: намаляване на доработките и валидиране на процеса.
- Клетка с позиционер – двуосен или треосен позиционер за дълги шевове и комплексни геометрии; цел: стабилна ориентация на шева и по-висок дебит.
- Линия с многороботна координация – паралелни операции (tack + final pass), синхронизация и балансиране на такта.
Чести грешки и как да ги избегнем
- Подценяване на приспособленията: нестабилна фиксация = нестабилен шев. Инвестирайте в добър джигинг и повторяема геометрия.
- Липса на стандарти за консумативи: дефинирайте тел, дюзи, форми на газовия поток и интервали за смяна/почистване.
- Непълна документация: без цифров „рецептник“ (параметри, корекции, снимки) няма скалируемост.
- OLP без реална калибрация: винаги валидирайте TCP, бази и офсети; използвайте процедури за автоматично калибриране.
Пътна карта за старт (4 стъпки)
- Диагностика – анализ на детайли, шевове, толеранси, консумативи; пилотен детайл.
- Дизайн на клетка – избор на робот/кобот, периферия, позиционери, безопасност и ергономия.
- Дигитална подготовка – офлайн симулация, рецепти и програми, план за обучение.
- Ramp-up и обучение – поетапно повишаване на такта, фино настройване на параметри, изчистване на „детски болести“.
Как Bullitt Robotics помага
- Подбор и оразмеряване на робот и периферия според процеса (MIG/TIG/лазер).
- Офлайн програмиране и въвеждане в експлоатация без спиране на производството.
- Интеграция на сензори за следене на шева и стандарти за качество.
- Обучение на оператори/технолози и документация за поддръжка.
- Подкрепа при сертифициране на безопасността на клетката.
Искате ли оценка на приложимостта за ваш продукт? Свържете се с нас за безплатна първична консултация и ориентировъчен план за внедряване.